
MOLAR NEWS
2020年第37期
MolarData人工智能每周见闻分享,每周一更新。
Facebook AI新研究:可解释神经元或许会阻碍DNN的学习
研究人员发现强有力的证据表明「即使神经元在很大程度上不具有类选择性,DNN 也能很好地发挥作用」。事实上,易于解释的神经元会损害 DNN 功能,甚至使网络更容易受到随机畸变输入的影响。


研究人员实验发现,类选择性的降低使DNN对模糊和噪声等自然失真更具有鲁棒性。而有趣的是,类别选择性的降低也使 DNN 更容易受到有针对性的攻击,在这种攻击中,图像被有意操纵以欺骗 DNN。这个结果出人意料有两个原因: 第一,因为类选择性已经被广泛用于理解 DNN 函数; 第二,因为类选择性在大多数 DNN 中自然存在。研究结果还表明,在缺乏类选择性的情况下,DNN自然地学习尽可能多的类选择性,而不会对性能产生负面影响。
来源:新智元
边缘AI新方法TinyML,超低功耗,存储占用KB计,在边缘设备上进行机器学习
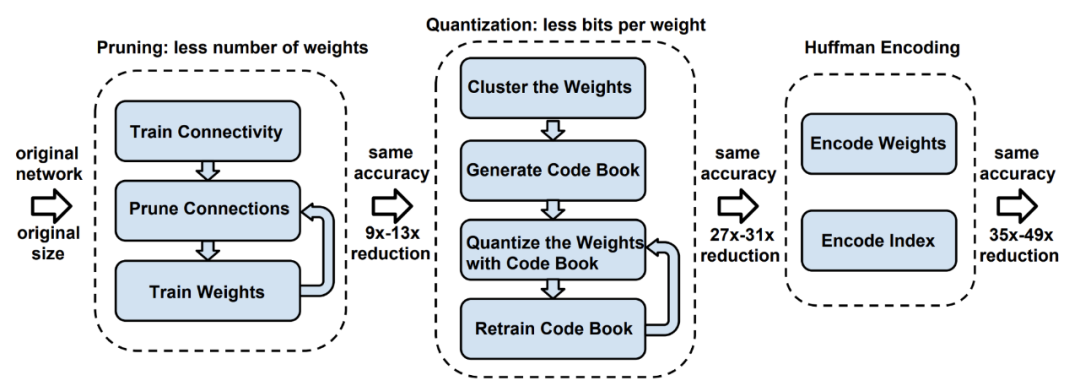
微型机器学习(TinyML)是机器学习和嵌入式物联网(IoT)设备的交集。该领域是一门新兴的工程学科,有可能使许多行业产生革命性变革。TinyML 的行业受益者是边缘计算和节能计算,其源于物联网(IoT)的概念。物联网的传统理念是将数据从本地设备发送到云上进行处理。
TinyML 算法的工作方式与传统机器学习模型基本相同。通常,这些模型是在用户的计算机上或云上进行训练的。后期训练是 TinyML 的工作真正开始的地方,这个过程通常被称为深度压缩。
来源:机器之心
在小树林飞也能又快又稳,这是港科大沈劭劼组的「猛禽」无人机重规划框架
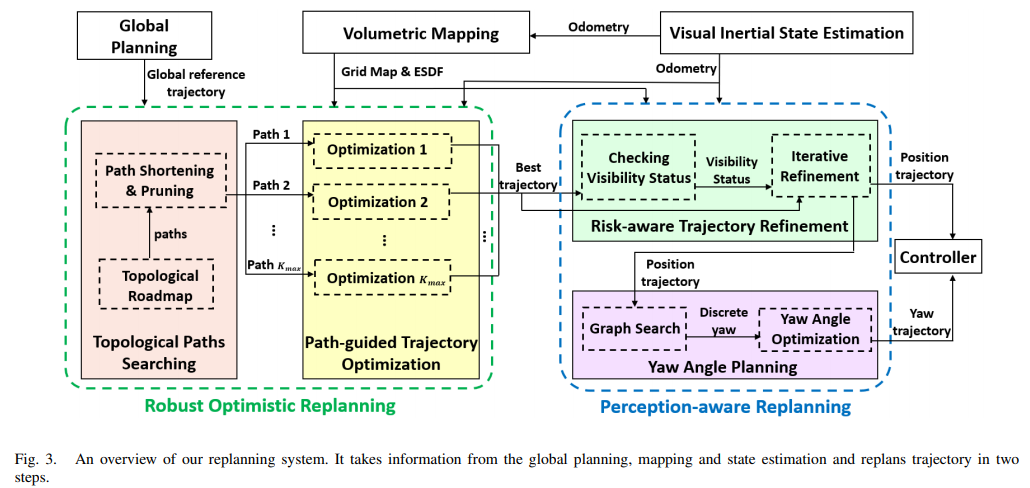
如果面前有一片树林,无人机能自己穿过去吗?现在的技术已经能够做到这一点,但速度一般。最近两年,港科大沈劭劼教授带领的研究小组向这一问题发起了挑战。他们提出的新方法不仅能让无人机穿过树林,还实现了快速自主导航。

首先,该研究提出了一种风险感知的轨迹精化方法,并将其与 optimistic 规划器相结合。利用该方法,沿着 optimistic 轨迹,识别对无人机存在潜在危险的未知区域。这些区域的可见度以及安全反应距离都被明确规定,以确保无人机能够更早地发现未标记区域中存在的障碍并及时躲避。其次,研究者将无人机的偏航角纳入了两步运动规划框架。在离散状态空间中寻找一个使信息增益和平滑度最大化的最优偏航角序列,并通过优化使其更加平滑。由偏航角规划的运动使视场(FOV)受限的四旋翼无人机主动探索未知空间,为下一步的飞行获取更多相关知识。
来源:机器之心
Hinton新作!越大的自监督模型,半监督学习需要的标签越少
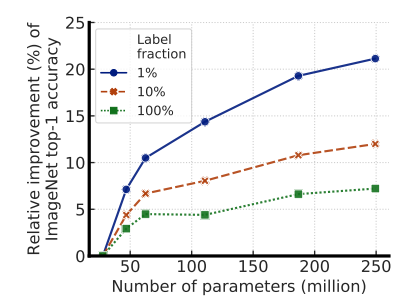
Ting Chen等人对ImageNet上的半监督学习进行了深入研究,并首次探索了“无监督预训练、监督微调”范式。这项研究为对比表示学习提供了一些重要的设计选择,这些选择有益于监督微调和半监督学习。一旦卷积网络完成了预训练和微调,其在特定任务上的预测就可以得到进一步改善,并可以提炼成更小的网络。
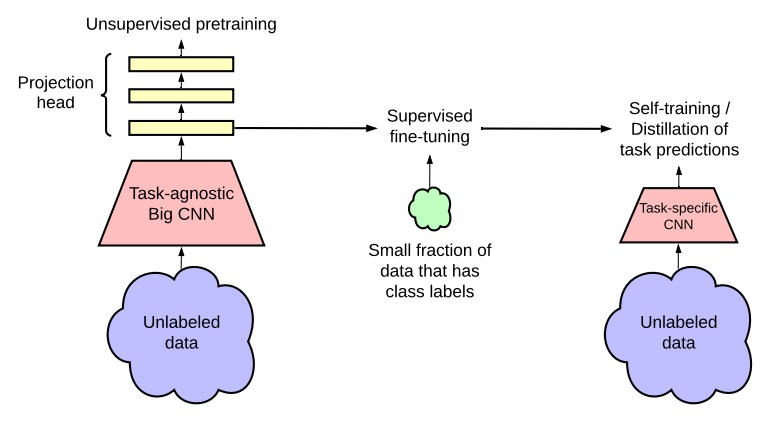
此外,作者还开发了对比学习框架SimCLR的改进版本,用于ResNet架构的无监督预训练,此框架被称为SimCLRv2。在ImageNet ILSVRC-2012上评估该方法的有效性,作者发现,仅需要1%和10%的标签,就可以实现与过去SOTA方法相当的性能。作者表示,对于这种范式的半监督学习,标记越少,就越有可能受益于更大的模型。
来源:AI科技评论
黑白键上的字节跳动:全球最大钢琴MIDI数据集背后的故事
10月,字节跳动发布全球最大的古典钢琴数据集 GiantMIDI-Piano,开发并开源了一套高精度钢琴转谱系统。
GiantMIDI-Piano 的用途包括但不限于音乐信息检索、自动作曲、智能音乐创作、计算机音乐学等。
简单说,GiantMIDI-Piano 把国际音乐数字图书馆上能找到,并能在网上搜索到的所有古典钢琴曲转换成了 MIDI 文件,并且在数据规模和精度上做到了世界顶级。
为了技术难点,做到高精度,GiantMIDI-Piano 的技术方案中用到了诸多当今领先的技术。
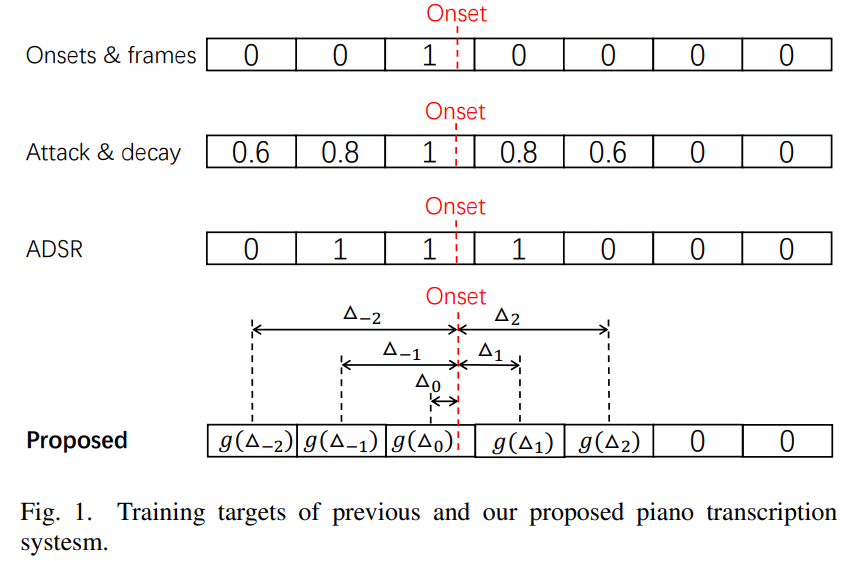
提出通过回归具体的时间,而不是分类去实现高精度,在训练过程中采用了回归距离的方法,去代替 Google 用的分类的方法,让训练的目标能以任意精度描述钢琴的起始时间和结束时间,这是一个创新,而且这个方法同时运用到了 onset 和 offset 当中,比分类的方法要稳定;
测试过程中提出了一种数学解析的算法,能够以任意精度预测 onset 开始点和 offset 结束的时间位置信息,同样这套高精度的算法也运用到了钢琴踏板转谱的技术里。
来源:机器之心
AI资讯
掌握最新时事新闻
长按扫码关注我们

原创文章,作者:整数智能,如若转载,请注明出处:https://www.agent-universe.cn/2020/11/8563.html