



-
清华大学推出全球首个车路协同自动驾驶研究数据集
-
Nexar视频数据集覆盖70多个国家,1400多个城市
-
行人目标检测数据集一览:KAIST、ETH、Daimler、Tinghua-Daimler、Caltech、NightOwls、ECP
-
夜间图像也清晰可见:Kaist行人数据集、FLIR热成像数据集、东京大学红外数据集
-
系列二:语义分割数据集
-
系列三:车道线检测数据集
-
系列四:光流数据集
-
系列五:Stereo Dataset
-
系列六:定位与地图数据集
-
系列七:驾驶行为数据集
-
系列八:仿真数据集
发布方:清华大学智能产业研究院(AIR)、北京市高级别自动驾驶示范区、北京车网科技发展有限公司、百度Apollo、北京智源人工智能研究院
-
下载地址:
https://thudair.baai.ac.cn/cooptest
-
发布时间:2022年
-
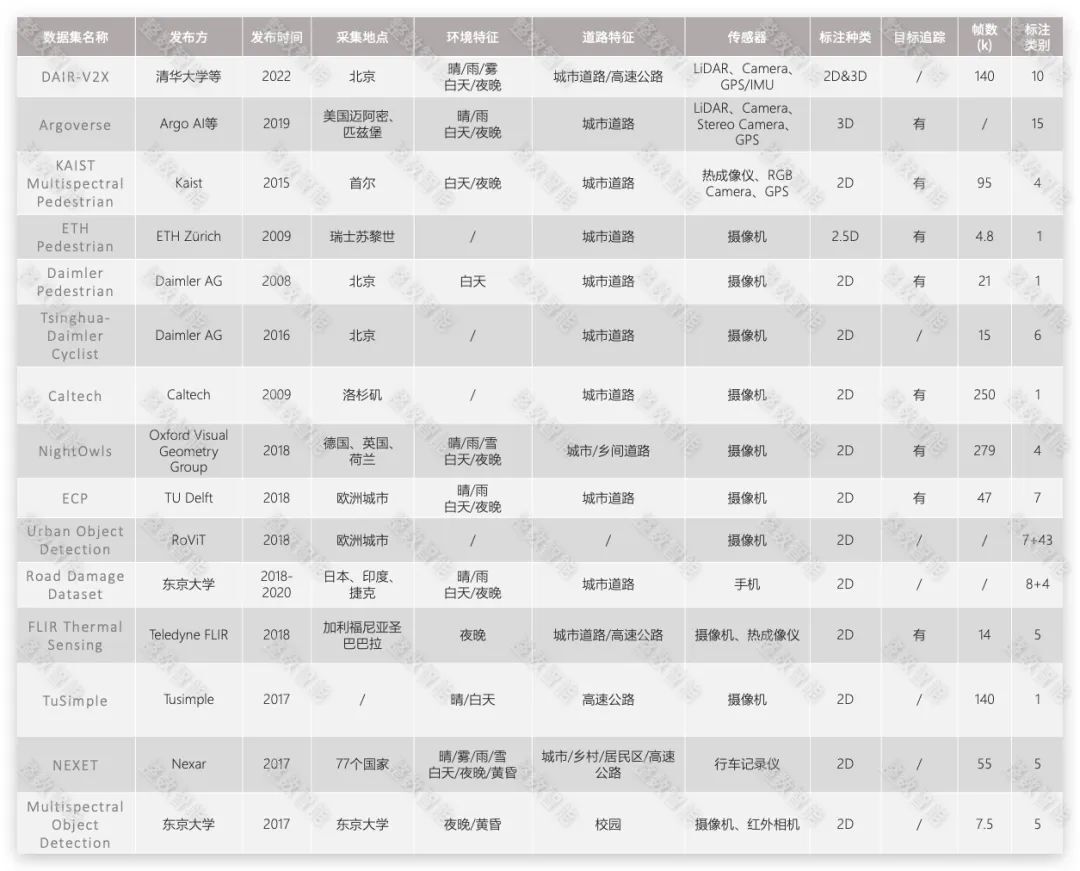
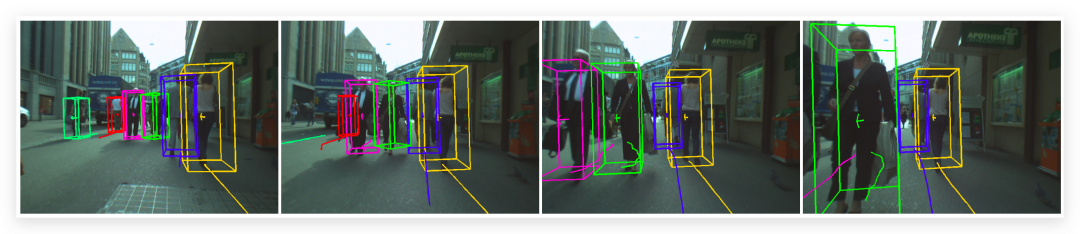
简介:DAIR-V2X数据集是全球首个用于车路协同自动驾驶研究的大规模、多模态、多视角数据集,全部数据采集自真实场景,同时包含2D&3D标注
-
特征
-
总计71254帧图像数据和71254帧点云数据
-
DAIR-V2X协同数据集(DAIR-V2X-C),包含38845帧图像数据和38845帧点云数据
-
DAIR-V2X路端数据集(DAIR-V2X-I),包含10084帧图像数据和10084帧点云数据
-
DAIR-V2X车端数据集(DAIR-V2X-V),包含22325帧图像数据和22325帧点云数据
-
首次实现车路协同时空同步标注
-
传感器类型丰富,包含车端相机、车端LiDAR、路端相机和路端LiDAR等类型传感器
-
障碍物目标3D标注属性全面,标注10类道路常见障碍物目标
-
采集自北京市高级别自动驾驶示范区10公里城市道路、10公里高速公路、以及28个路口
-
数据涵盖晴天/雨天/雾天、白天/夜晚、城市道路/高速公路等丰富场景
-
数据完备,包含脱敏后的原始图像和点云数据、标注数据、时间戳、标定文件等
-
训练集和验证集已发布,测试集将随同后续Challenge活动发布
-
发布方:Argo AI、卡内基梅隆大学、佐治亚理工学院
-
下载地址:
https://www.argoverse.org/av1.html
-
论文地址:
https://arxiv.org/pdf/1911.02620.pdf
-
发布时间:2019年
-
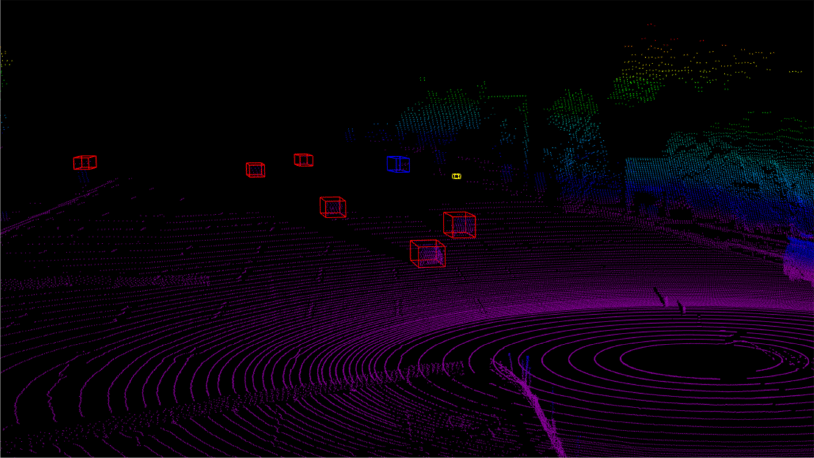
简介:Argoverse 数据集包含 3D Tracking 和 Motion Forecasting 两部分。Argoverse数据集与Waymo有些不同,虽然它也包含激光雷达和摄像头数据,但它只覆盖了在迈阿密和匹兹堡记录的113个场景。其特别之处在于,它是第一个包含高清地图数据的数据集
-
特征
-
第一个包含高清地图数据的数据集:包含匹兹堡和迈阿密290公里的车道地图,如位置、连接、交通信号、海拔等信息
-
传感器:2个激光雷达,7个高分辨率环形相机 (1920 × 1200),2个立体相机( 2056 × 2464 )
-
Argoverse 3D tracking
-
包含 113 个场景的 3d 跟踪注释,每个片段长度为 15-30 秒,共计包含 11052个跟踪对象
-
对5米内的物体进行标注,共15个标签
-
70%的标注对象为车辆,30%行人、自行车、摩托车等
-
Argoverse Motion Forecasting
-
从在迈阿密和匹兹堡的1006小时驾驶记录中获取,总计320小时
-
包含324,557 个场景,每个场景 5 秒,且包含以 10 Hz 采样的每个跟踪对象的 2D 鸟瞰图
-
发布方:韩国科学技术院(Korea Advanced Institute of Science and Technology)
-
下载地址1:
https://sites.google.com/site/pedestrianbenchmark/download
-
下载地址2:
https://sites.google.com/site/pedestrianbenchmark/download
-
论文地址:
https://openaccess.thecvf.com/content_cvpr_2015/papers/Hwang_Multispectral_Pedestrian_Detection_2015_CVPR_paper.pdf
-
发布时间:2015年
-
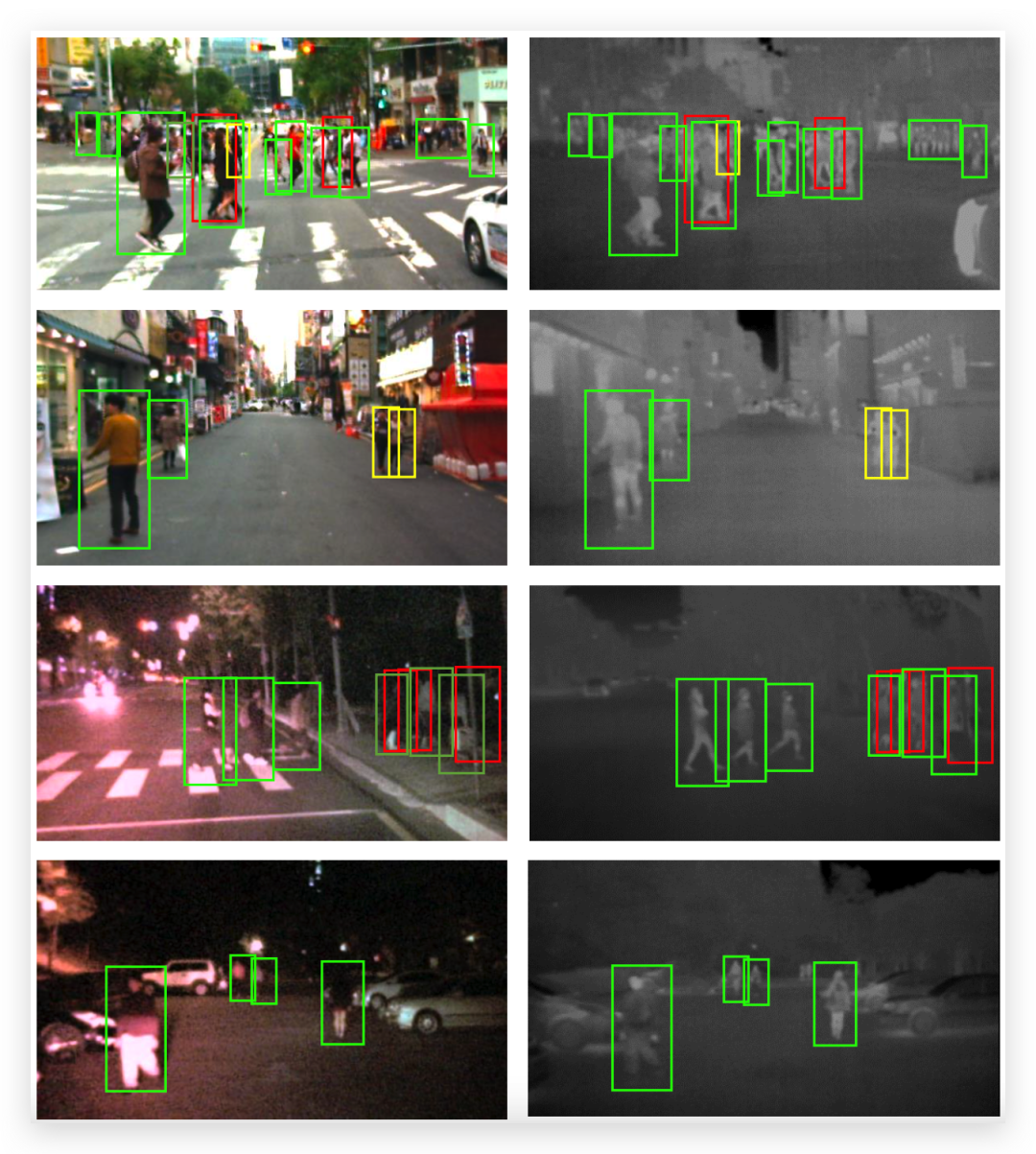
简介:该数据集为多光谱行人检测数据集,提供白天和夜晚的彩色-热成像图像对。数据集通过彩色图像和热成像的优势互补,提高了行人检测的准确度,克服了以往行人检测数据行人被遮挡、背景混乱、夜间成像不清晰等问题
-
特征
-
同时提供白天和夜间的95328对彩色-热成像图像,并且通过分束器的处理对齐图像,消除图像视差
-
数据采集地点为韩国首尔,图像分辨率为640×480
-
103,128个人工2D框标注, 1,182 个行人
-
四种不同类型的标注:person、people(不清晰的人像)、cyclist、person?(不确定是否为行人)
-
采集设备:包含热成像仪、RGB摄像机、分束器等的采集设备
-
发布方:苏黎世联邦理工大学 (ETH Zürich)
-
下载地址:
https://icu.ee.ethz.ch/research/datsets.html
-
论文地址:
https://www.vision.rwth-aachen.de/media/papers/ess08cvpr.pdf
-
发布时间:2009年
-
简介:ETH是一个行人检测数据集,使用摄像机拍摄共三个视频片段,数据集只有一个行人标签
-
特征
-
测试集包含3个视频片段,共4800帧,帧率为15,共1894个标注
-
使用2.5D标注,进行抽帧标注,每四帧标注一次
-
采集于瑞士苏黎世人员密集的街区
-
使用摄像机进行拍摄
-
发布方:Daimler AG
-
下载地址:
http://www.lookingatpeople.com/download-daimler-ped-det-benchmark/index.html
-
论文地址:
http://gavrila.net/pami09.pdf
-
发布时间:2008年
-
大小:8.5GB
-
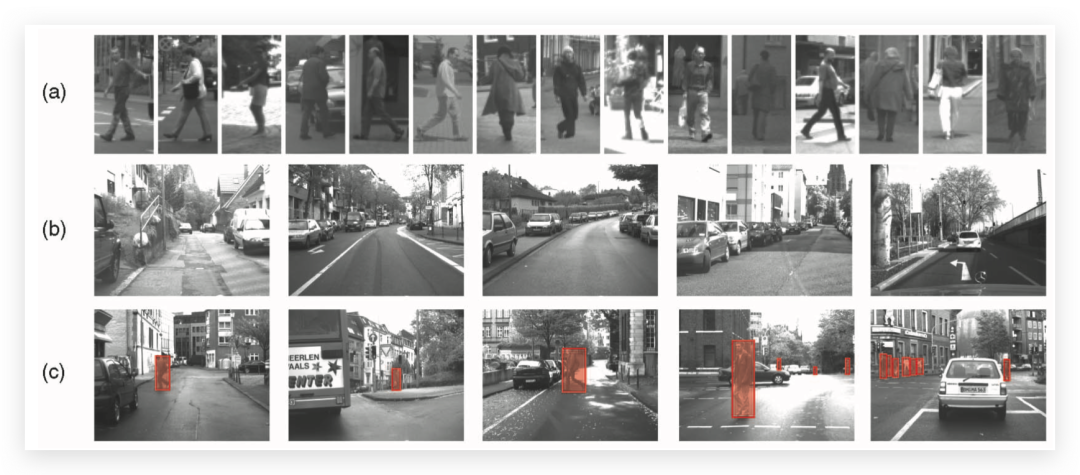
简介:戴姆勒行人检测数据集是采集于城市环境的行人检测数据集,采集的环境均为白天。数据集分为训练集和测试集两部分,训练集又包括行人图像和不包含行人的图像
-
特征
-
27分钟的视频片段
-
15560张行人的图像(剪切后分辨率为48×96),6744张不包含行人的图片
-
21,790 张图片(640×480 分辨率), 56,492个2D人工标注
-
视频通过行驶车辆上的摄像头采集,场景全部为日间城市道路
原创文章,作者:整数智能,如若转载,请注明出处:https://www.agent-universe.cn/2022/03/8557.html