
我们希望能够搭建一个AI学习社群,让大家能够学习到最前沿的知识,大家共建一个更好的社区生态。
https://www.feishu.cn/community/article/wiki?id=7355065047338450972
点击「订阅社区精选」,即可在飞书每日收到《大模型日报》每日最新推送
如果想和我们空间站日报读者和创作团队有更多交流,欢迎扫码。
欢迎大家一起交流!


学习
波士顿动力:机器人与控制中机器学习的归纳偏好(四足部分)(RSS 2024)
-
MPC+: 结合了深度强化学习(RL)和模型预测控制(MPC),使得 RL 策略能够输出更精细的落脚点、接触序列和速度修正量,以提高 MPC 的性能。 -
RL Whole Body Control: 实现了一个简化的 PMTG 策略,不依赖特权信息或复杂训练方法,取得了与量产 MPC 算法相当甚至更优的效果。 -
基于学习的控制器选择: BD 采用了并行运行多个 MPC 实例的策略,并通过 RL 选择最合理的解,这一方法已在实际产品中得到应用。 -
技术挑战与优化: 指出了 RL 与 MPC 结合时的技术挑战,如训练效率、环境非线性和客户审美偏好,以及如何通过优化算法和环境生成来克服这些问题。
 https://zhuanlan.zhihu.com/p/709997736?utm_psn=1799347579873550337
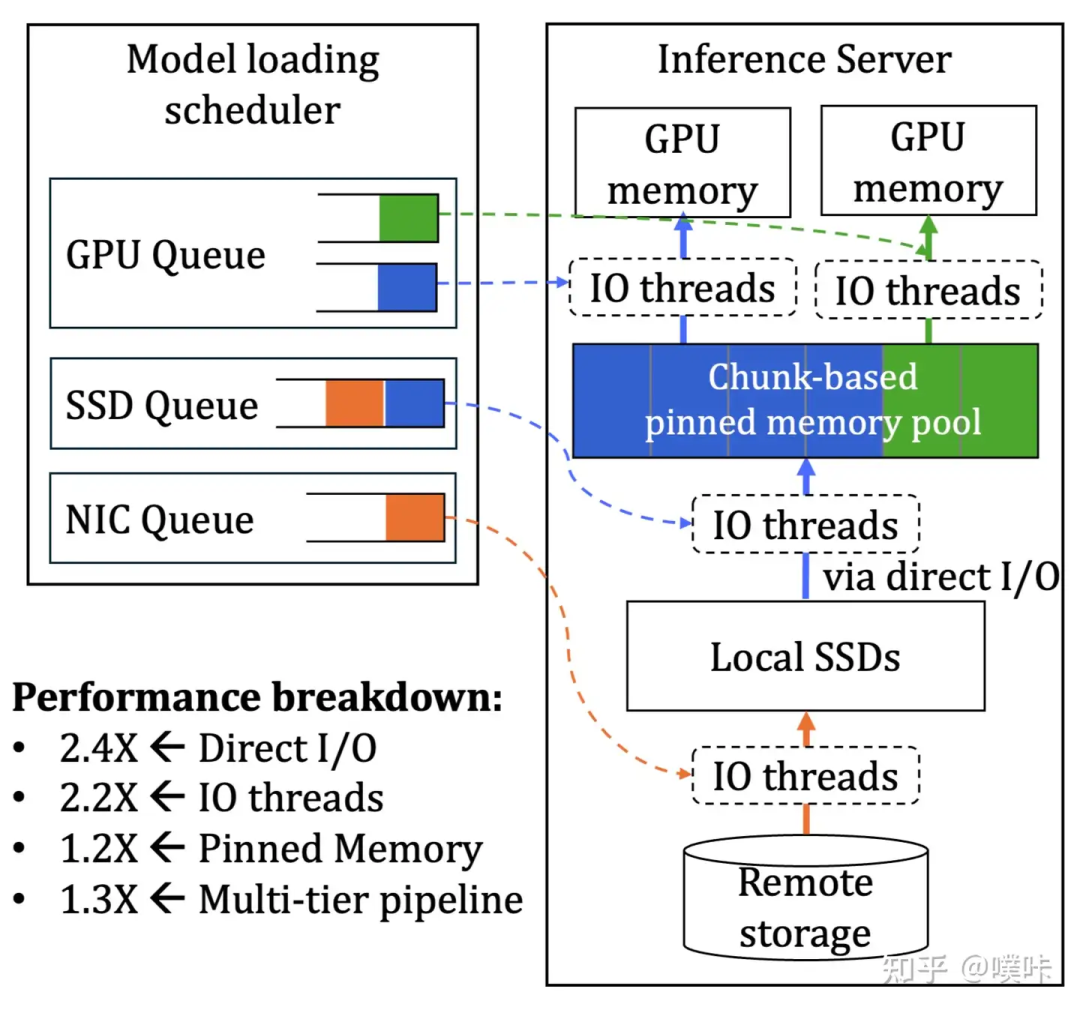
https://zhuanlan.zhihu.com/p/709997736?utm_psn=1799347579873550337第一视角下关于 ServerlessLLM 的故事(上)
 https://zhuanlan.zhihu.com/p/710476102?utm_psn=1799348933778092032
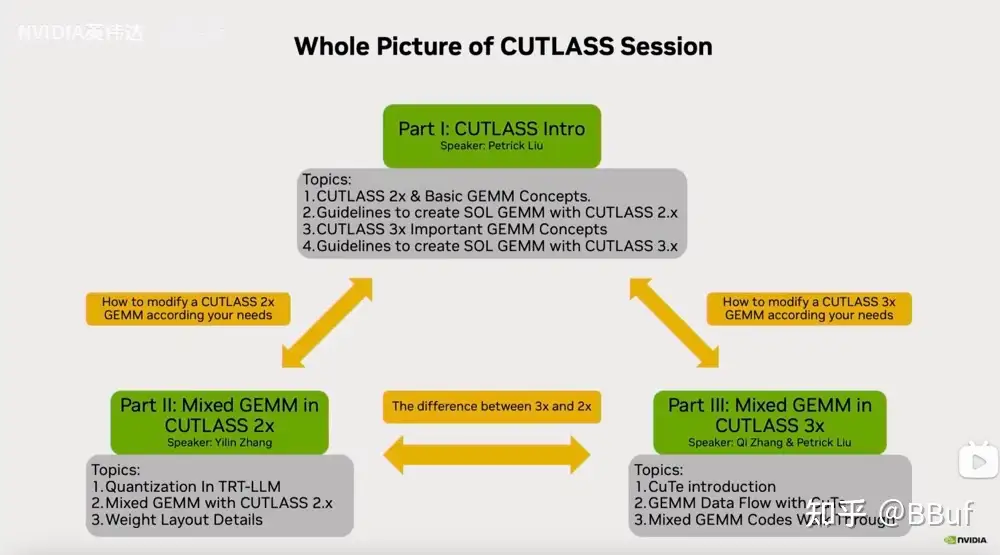
https://zhuanlan.zhihu.com/p/710476102?utm_psn=1799348933778092032CUTLASS 2.x & CUTLASS 3.x Intro 学习笔记
 https://zhuanlan.zhihu.com/p/710516489?utm_psn=1799349278482755585
https://zhuanlan.zhihu.com/p/710516489?utm_psn=1799349278482755585cutlass swizzle机制解析(一)
16x8x16xfp16 大小的矩阵乘法为例,详细描述了 ldmatrix 指令如何从共享内存加载数据到寄存器文件,然后通过 mma 指令进行计算。为了完成这一过程,需要分成多个 phase,每个 phase 负责读取一个 8x8xfp16 矩阵,并确保每个线程读取的 4 bank 数据连续,但线程间的数据不要求连续。通过对 bank 冲突的讨论,文章指出只有传给 ldmatrix 每个线程的地址合理,才能避免 bank 冲突。最后,文章通过一个 Swizzle<3, 3, 3> 的例子,说明了 swizzle 机制如何通过异或运算对矩阵元素进行重映射,以解决 bank 冲突问题。笔记:学习推理加速半年之总结与迷思
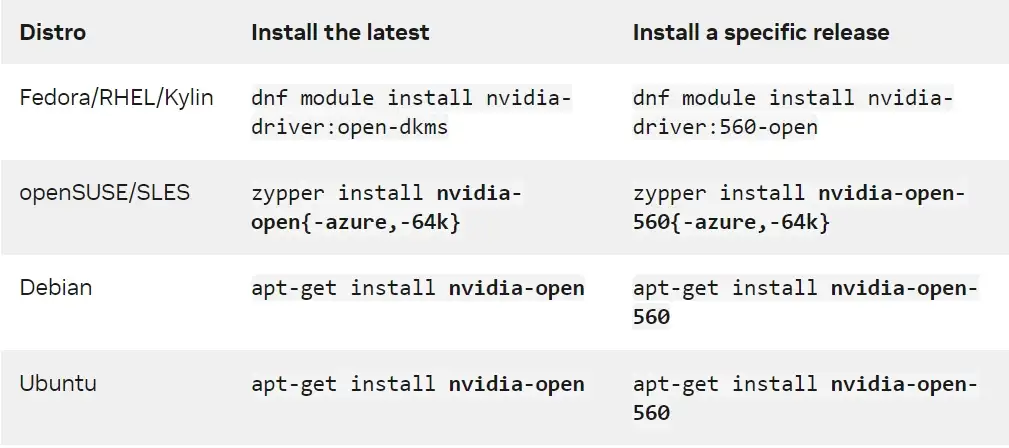
NVIDIA 全面转向开源 GPU 内核模块
 https://zhuanlan.zhihu.com/p/710506291?utm_psn=1799352486617825280
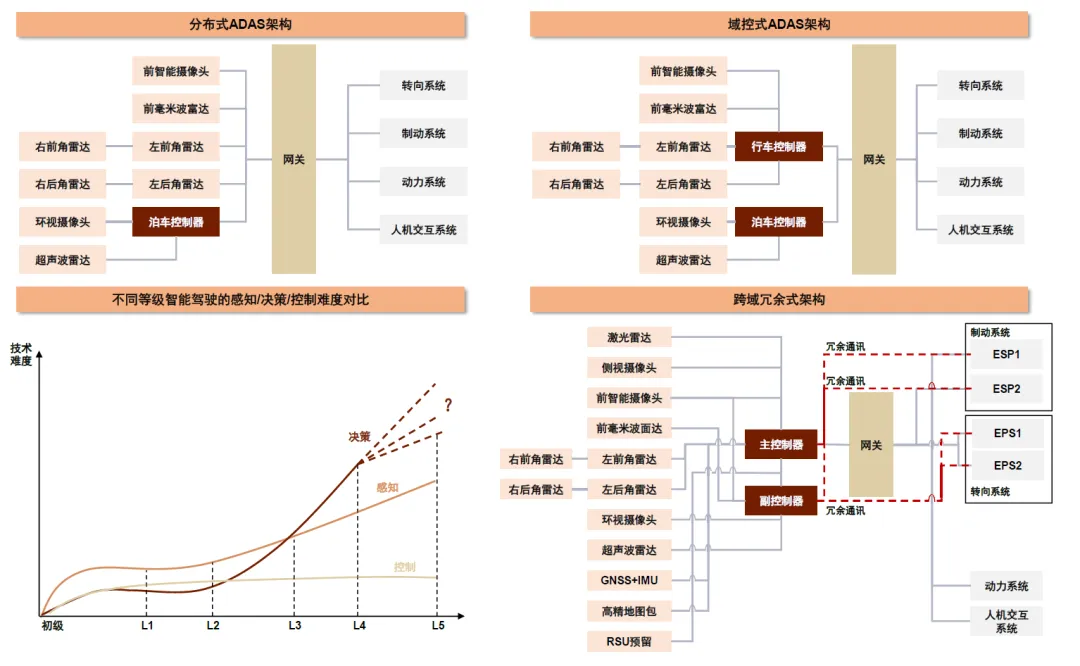
https://zhuanlan.zhihu.com/p/710506291?utm_psn=1799352486617825280Robotaxi四问四答
-
感知:需要高精度的传感器(如激光雷达)和高精度地图,以及对 Corner case(如编织袋、临时改道等)的处理能力。 -
预测:涉及对动态障碍物未来轨迹的预测,特别是在多主体交互和长尾障碍物轨迹预测方面。 -
决策:决策模块需要在不确定的环境中工作,处理复杂场景下的博弈和交互,以及提供与人类驾驶员一致的乘坐体验。 -
控制:控制模块需要精确控制,以确保车辆的行驶平稳和精确。
 https://mp.weixin.qq.com/s/bpIJ4bYy-AltnQ1pJyHnxw
https://mp.weixin.qq.com/s/bpIJ4bYy-AltnQ1pJyHnxwAwesome-LM-SSP
 https://github.com/ThuCCSLab/Awesome-LM-SSP
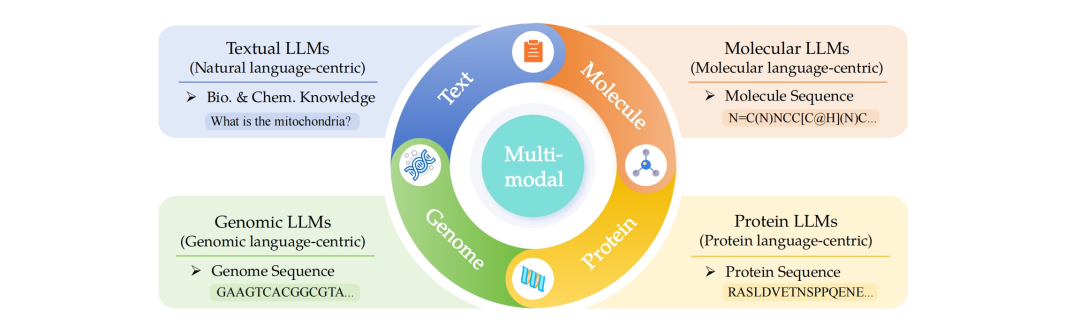
https://github.com/ThuCCSLab/Awesome-LM-SSPScientific-LLM-Survey
原创文章,作者:LLM Space,如若转载,请注明出处:https://www.agent-universe.cn/2024/07/14004.html